VISIONAIRY® by Spleenlab
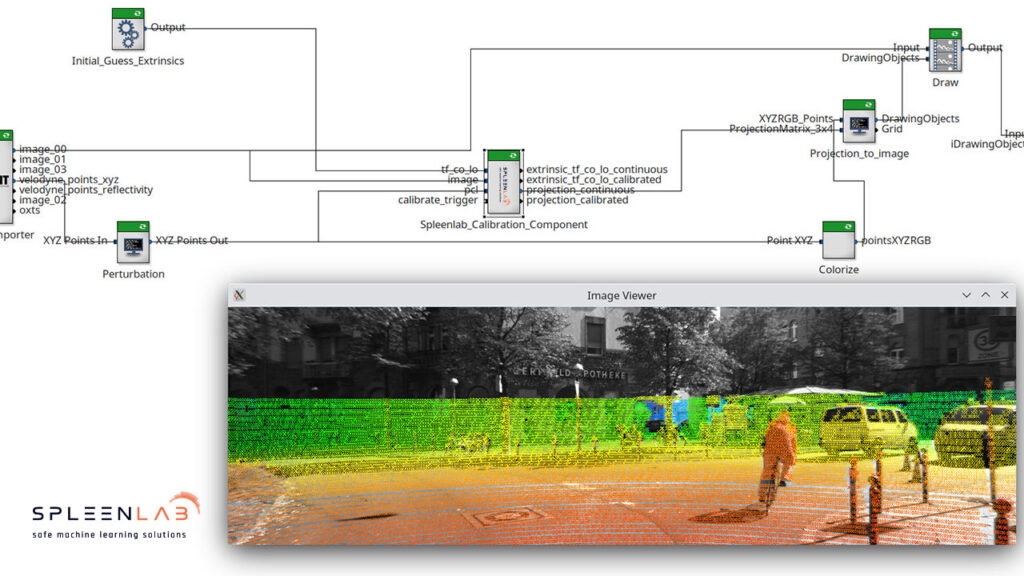
VISIONAIRY® Online Calibration by Spleenlab Online Calibration Data fusion Get Started What IS VISIONAIRY? The online calibration solution for sensor fusion based autonomy applications. VISIONAIRY® Online Calibration is a fundamental enabler for sensor fusion based autonomy functions. Factory provided extrinsic calibrations are challenging to acquire and lose their accuracy over time. Spleenlab‘s Online Calibration application provides […]
Hybrid fusion positioning by IFSTTAR
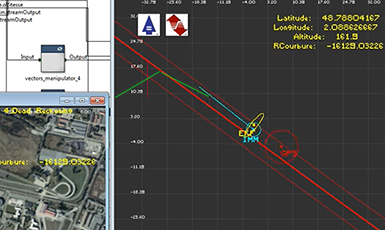
Hybrid Fusion Positioning by IFSTTAR Fusion Positioning Get Started What is HYBRID FUSION? HYBRID FUSION Positioning by IFSTTAR The hyrid fusion package is dedicated to outdoor vehicle positioning based on combination of differents sensor sources such as GPS, odometers and IMUs (Inertial Measurement Units). The hybrid fusion package implements Interacting Multiple Model (IMM) and Extended […]