Software Engineer – Cloud | C++ / Python / JavaScript
Développeur Full Stack – Web et Cloud (Python / JS) (H/F) Emploi Temps plein, CDI | Issy-les-Moulineaux – France | Télétravail possible Descriptif du poste Vous êtes passionné de développement logiciel et souhaitez participer à la mise au point des technologies de demain ? Rejoignez-nous pour innover et développer les solutions logicielles les plus performantes. […]
Software Engineer – Customer Support | C++ / Python
Ingénieur Logiciel / Support Technique (H/F) Emploi Temps plein, CDI | Issy-les-Moulineaux – France Ref20210401 Descriptif du poste En charge de l’assistance technique aux utilisateurs de RTMaps, vous serez amené à apporter votre expertise pour répondre aux besoins des clients sur des domaines très variés du fait de la très grande versatilité de RTMaps. Avec […]
Software Engineer – R&D | C++ / Java
Ingénieur développement logiciel C++ / Java (H/F) Emploi Temps plein, CDI | Issy-les-Moulineaux – France Ref20210331 Descriptif du poste Vous êtes issu d’une formation ou école d’ingénieur. Nous recherchons actuellement un ingénieur logiciel. vous serez amené à apporter votre expertise pour répondre aux besoins des clients sur des domaines très variés du fait de la […]
Y-Smart Connector by Yogoko
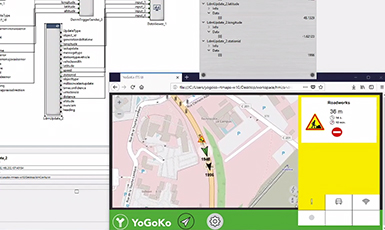
Y-SMART Connector by YOGOKO Get Started What is Y-SMART CONNECTOR? Data and communication management software platform for connected & cooperative mobility If you need to optimize and secure all data exchanges between vehicles, road users, road & urban infrastructure, and the cloud. If you are involved in the integration of on-board, off-board and roadside solutions. […]
Hybrid fusion positioning by IFSTTAR
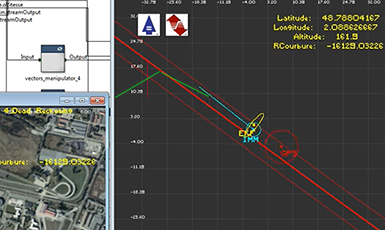
Hybrid Fusion Positioning by IFSTTAR Fusion Positioning Get Started What is HYBRID FUSION? HYBRID FUSION Positioning by IFSTTAR The hyrid fusion package is dedicated to outdoor vehicle positioning based on combination of differents sensor sources such as GPS, odometers and IMUs (Inertial Measurement Units). The hybrid fusion package implements Interacting Multiple Model (IMM) and Extended […]
Digital Maps by Benomad
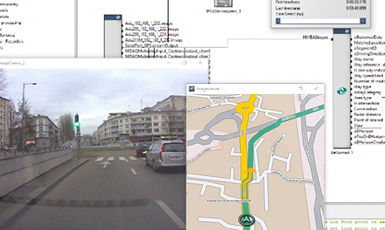
Digital Maps by BENOMAD HD Maps Navigation Get Started What is DIGITAL MAPS by benomad? Mapping SDK and Navigation API from Benomad in RTMaps The Mapping SDK and Navigation API provided by Benomad are a modular, multi-platform software development kits designed to enrich business applications with advanced mapping functionality. They simplify the process of integrating […]
CoreSLAM by MINES ParisTech
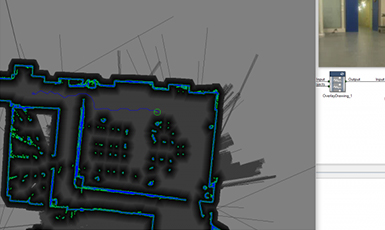
CoreSLAM by Mines PARISTECH SLAM Localization Mapping Get Started What is Coreslam? CoreSLAM algorithm by Center of Robotics of Mines ParisTECH The CoreSLAM algorithm by Center of Robotics of Ecole des Mines-ParisTech (CAOR) allows a robot equipped with a single laser scanner (e.g. Hokuyo UTM-30-LX) to build a local 2D map of its environment and […]
Drive4U Locate by Valeo
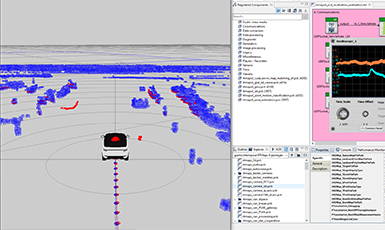
Drive4U LOCATE by VALEO SLAM Localization Mapping Get Started What is valeo drive4U locate? Localization and Mapping Solutions for Automated Driving Valeo Drive4U Locate is an affordable, precise and robust localization and mapping solution for Automated Driving developed by Valeo.This solution enables centimetric accuracy in poor and denied GPS conditions, it is suitable for indoor and […]