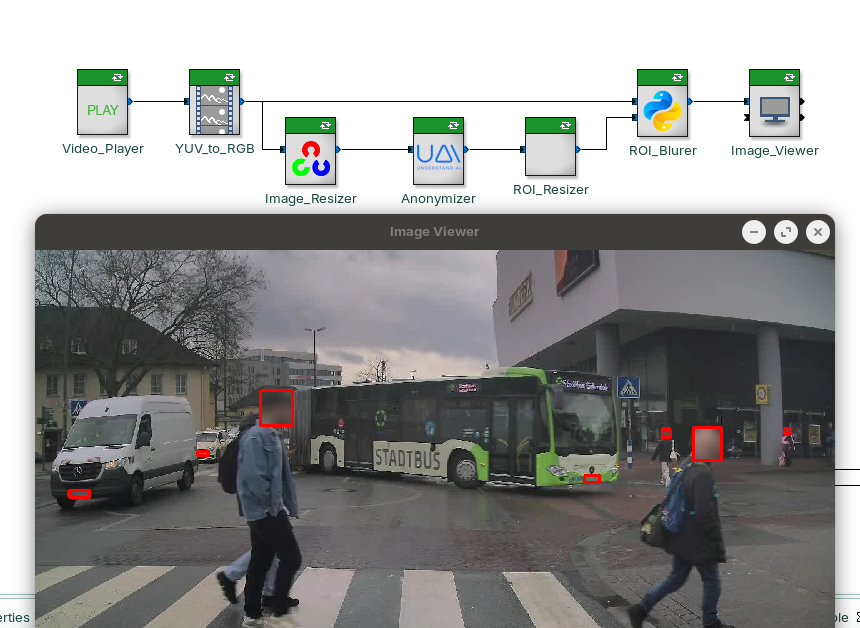
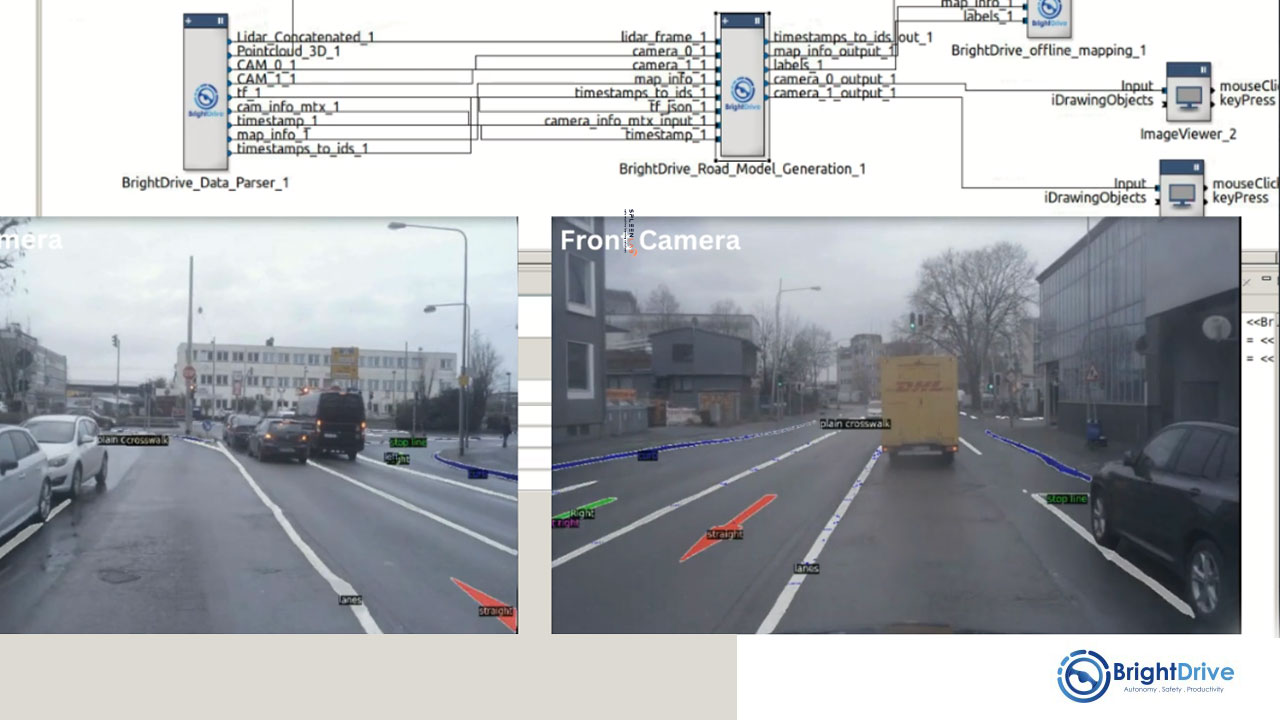
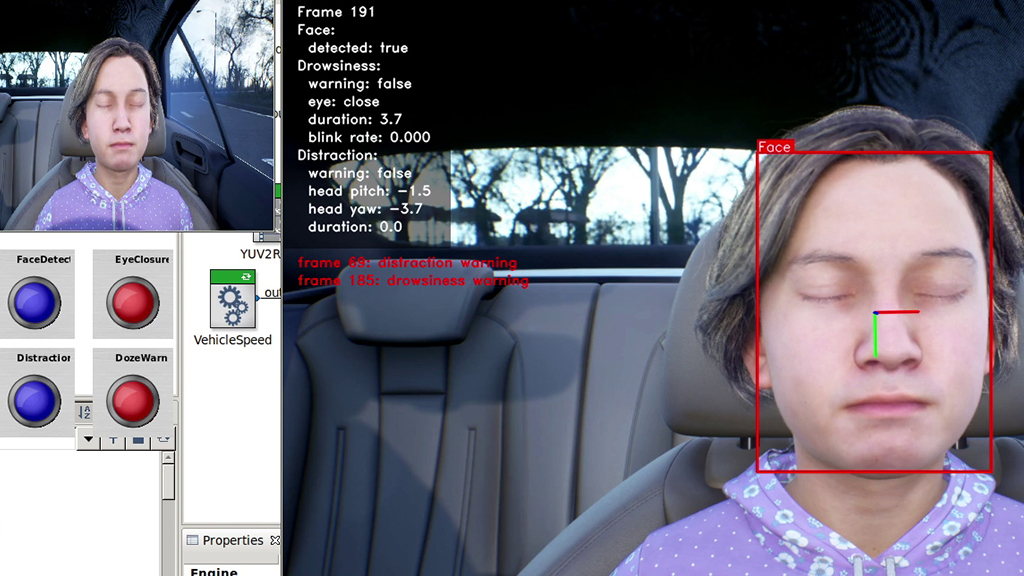
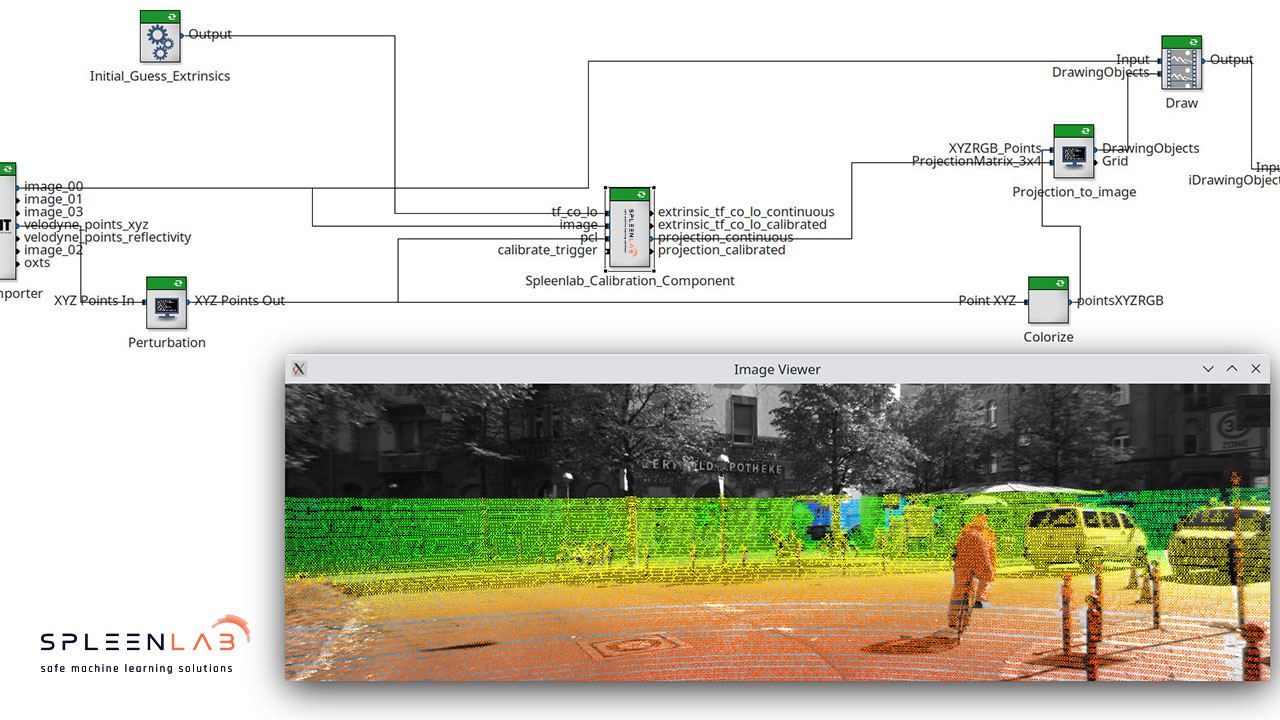
The RTMaps AI Components Store presents an ecosystem of off-the-shelf algorithms and software librairies developed by researchers, techno-providers or industrial partners from all around the world. These advanced technologies are made to address various functions (such as perception, vision, detection, classification, segmentation, data fusion, localization, data anonymization, driver monitoring, path planning, calibration, communication and so on..) that aim to make advanced development collaborative, easier and reliable for RTMaps users.
Algorithms and other advanced software functions presented below can be either licensed by their authors and owners, or distributed by Intempora. In any case, we have made sure they are developed with a high degree of maturity, with a modular approach making them easy to integrate in your own RTMaps applications.
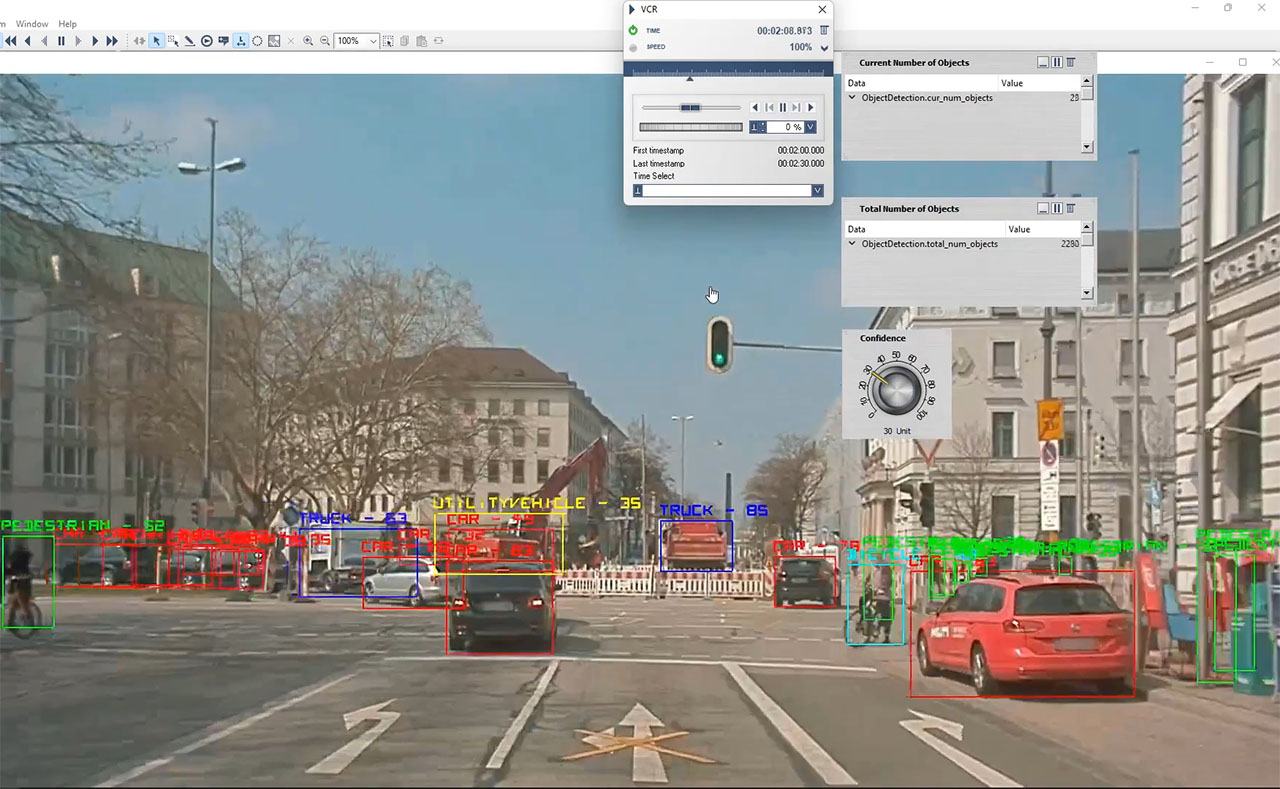
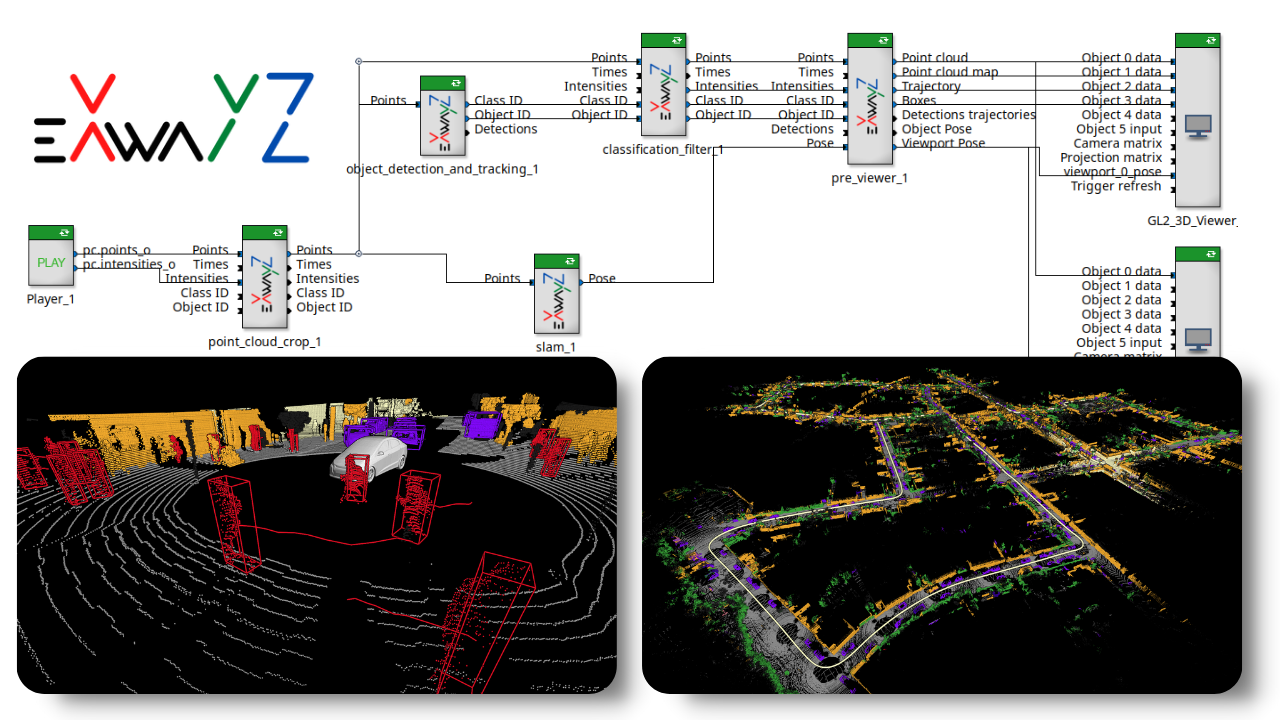
Drag and Drop your perception algorithms
BOOST YOUR DEVELOPMENT & productivity WITH READY TO USE ALGORITHMS
The RTMaps AI Components Store is an open ecosystem where everyone can publish and highlight software functions and algorithms. It allows you to highlight the work done by your team or company and unlock new business models.
After partnership established, you can implement your code as a ready-to-use drag and drop RTMaps components and decide to promote or distribute this package with your evaluation kit, as a prototyping or production grade applications.
At Intempora, we aim to build a strong and innovative community around RTMaps where our customers, partners, researchers but also students and technology providers from all over the world can highlight, share and exchange their work and make the development of advanced applications easier.
Everyone can choose and benefit of these turnkey components for their own applications or contribute to accelerate the development and deployment of innovative applications by delivering their own software functions for other companies.
Highlight your expertise
The RTMaps AI Components Store is an open ecosystem of algorithms or software functions developped as RTMaps components and available for everyone. Our idea is to showcase the expertise and the work done by our users and partners with a simple idea:
RTMaps ease the collaboration the teamwork between different engineering teams.
For developers
HIGHLIGHT your expertise and work
PROTOTYPE and DESIGN algorithms has never been faster and easier.
DELIVER state of the art perception or decision making algorithms for industrials over the world.
PLUG and PLAY software functions as lego
DEVELOP your own components thanks to the SDK!
SHARE your work and COLLABORATE with your colleagues, partners and providers.
DEBUG and MEASURE latencies with monitoring tools.
For your organisation
UNLOCK new business models and TAKE ADVANTAGE of RTMaps ecosystem.
REACH new leads and ACCESS to all RTMaps partners and customers.
HIGHLIGHT your team work throught nice algorithm demonstrations and videos
PUT forward your AI expertise and knowledge to partners, providers and RTMaps ecosystem.
MEET and BUILD new partnerships with small and big companies.
ACCELERATE your project or demonstration purpose.
PROTECT your code by IP, keep your code safe
Are you a technology provider?
Feel free to contact us via the Partnership application form. We can provide free RTMaps licenses and help you integrate your IP into binary RTMaps components. The technology stay the property of their editor.
Your algorithms then become available for free or with purchase to any RTMaps user without any SDK / API / compilation. This way customers can evaluate, integrate and test your advanced features in a few clicks ! Feel free to test it and publish your algorithm in the store.
Are you a RTMaps user?
You can find here various on-the-shelf libraries from Intempora partners integrating their advanced technologies for various functions (perception, vision, data fusion, localization, etc.).
These technologies are the property of their editor. We made sure that they are correctly integrated into RTMaps components, documented, and easy to configure and to use.
Algorithms can be integrated in your RTMaps applications in a few clicks!
We use cookies on our website to give you the most relevant experience by remembering your preferences and repeat visits. By clicking “Accept”, you consent to the use of ALL the cookies.
This website uses cookies to improve your experience while you navigate through the website. Out of these cookies, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may have an effect on your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.